 |
 TOPページへ戻る TOPページへ戻る |
| 電子回路作品集 |
| 電光掲示板(大) |
| 電光掲示板(中) |
| 電光掲示名札1 |
| 電光掲示名札2 |
| 電光掲示ウェルカムボード |
| 486マイコンボード |
| Z380マイコンボード |
| 超高速フーリエ変換器 |
| 空中配線ロボット |
| 組込み型 PROM・GALライター |
| CPLDユニバーサルプログラマ |
| CMOSデジカメ |
| 基板年賀状 |
| 空中配線ロボット |
| 平成9年10月完成 平成12年10月28日一部修理 平成13年2月煙を吹く 平成15年12月再び火を吹く 平成16年5月コンデンサ取替 |
| メール |
 御意見、御感想は 御意見、御感想はnahitafu@nifty.com |
| Copyright |
| このWebページ上で紹介したすべての回路、情報、内容に関する著作権は私、なひたふが所有します。無断転載を固く禁じます。 (C)Copyright 1999-2001 Nahitafu |
空中配線ロボット
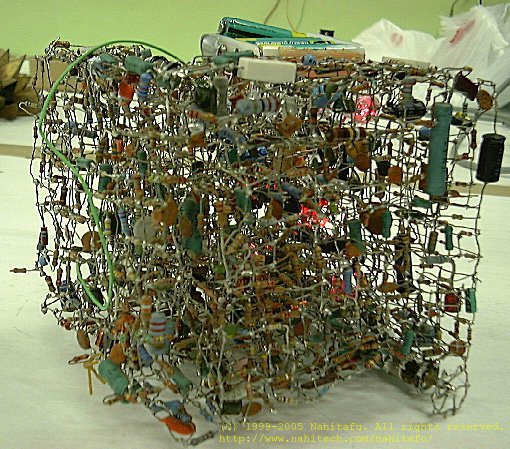
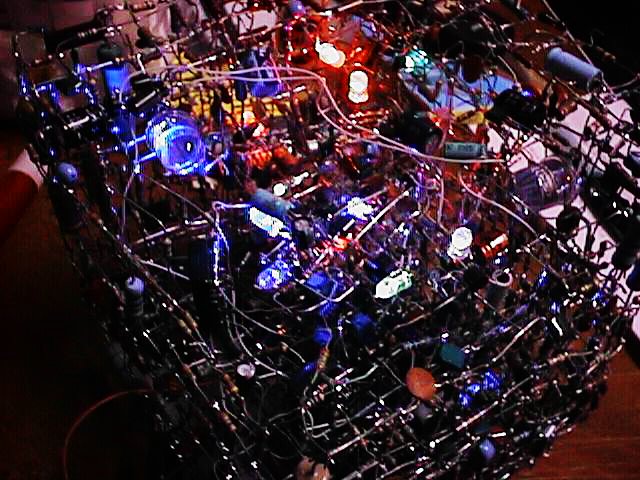
数千個のL,C,R等の受動部品を空中配線で縦横無尽に組み合わせ、立体的な回路を作りました。ピカピカと鮮やかな光を放ち、うろうろとランダムウォークします。障害物に当たると(ある特定の回路がショートして)それを検知し、後退・旋回をして、方向転換します。使った能動部品はトランジスタのみで、ICは使っていません。大きさは一片が約15cmの立方体です。こういう構造のものは全体の78%が破壊されてもその機能を維持できると言われています。
これは、電子回路で芸術を行うことを志して製作した作品です。
製作の経緯
このロボットは、私が東京工業大学のロボットサークルに所属していた頃に、大学の学園祭のために製作しました。最初に製作してからもう7年が経ちます。7年間のうちに2回火を吹きましたがまだ動きつづけています。
 このロボットはもともと、SRゲームと言うゲーム用の的としてに開発されました。
このロボットはもともと、SRゲームと言うゲーム用の的としてに開発されました。
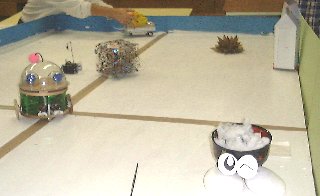
SRゲームとは、縦横無尽に動き回るロボット(SRという)を光線銃で撃つゲームです。
SRゲームの的になるロボットは、動き回ることができて、障害物に当たるを後退するなどして迂回し、光線銃で撃たれると何か芸をしなければいけないというルールになっています。
右の図はSRゲームを行っているときの写真で、他のロボットとともに元気良く動き回っていました。
SRゲーム中の故障
SRゲームを行っている最中にもかなりダメージを受けました。それは他のロボットが高速で体当たりしてくるためです。衝突を繰り返して美しい立方体がひしゃげましたが、外壁が厚いのでちゃんと動作しています。奇跡です。途中何度か回路がショートしたりしましたが、学園祭(工大際)の展示中は2日間の日程の最後まで動いてくれました。でも、最後はモーターが機械的に壊れてしまったので動けなくなりました。自己再生できないのが残念です。
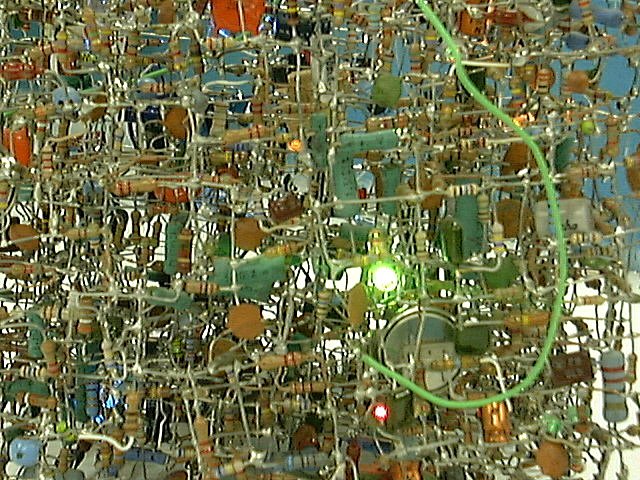
全体像
なお、このページの最初の写真は、ロボットの全体像です。ちょっとひしゃげた正方形になっていますが、それは他のいろいろなロボットに衝突したためです。もちろん指で部品を引っ張れば、もとの綺麗な立方体に戻ります。
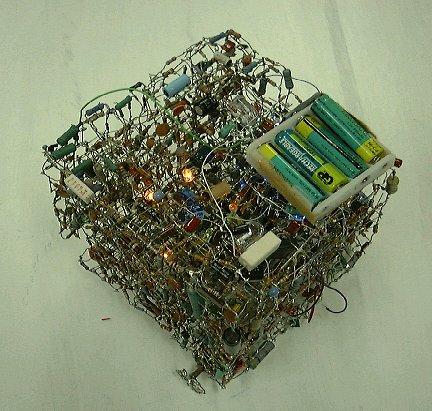
右の写真は上から撮影したものです。天井に載っている電池は電子回路用の電源で、モータ駆動用の電池は底面にあります。計8本の単三電池で動きます。
なお、下の写真をクリックすると回路のドアップ画像が見られます。壁紙などにどうぞ。
ロボットの構造材
このロボットのすべてが電子部品で作られています。もちろんネジやアルミ板を使うなどということは言語道断です。
車輪さえもホーロー抵抗や錫メッキ線で作られています。空中配線も立体的に組み合わせれば結構丈夫な強度を持つようになります。最初はふにゃふにゃでも空中配線の規模が大きくなるとだんだんがっしりしてきます。そして、15cmくらいの立方体になれば走り回って、ぶつかっても耐えられるほどの丈夫さにはなります。
なお、これだけの多種多様な部品をそろえるのには、鈴商というお店のパーツ袋のお世話になりました。
動作の仕組み
回路は、基本的にCRタイマーと無安定マルチバイブレータでできています。
タイマーの出力情報の伝達は光(LED+CDS)で行います。なぜこのようにしたかはあまり覚えていないのですが、電気回路で直結するとフィードバックのループゲインが大きすぎて問題になるためだったような気がします。インターフェースを光で伝えればそれ自体がイルミネーションにもなるのでいいかな、という程度の軽い気持ちで設計しました。イルミネーション用LEDの光がタイマー情報に擾乱を与えないように、CDSには簡単な遮光フードをかぶせています。
無安定マルチバイブレーターで作ったタイマーが満期になると、別のCRタイマーを励起します。CRタイマーが動作している期間、モーターの回転方向を逆転させるような指示が出ます。このようなタイマーが覚えているだけでも6個くらいあり、それぞれの時定数が異なるようにセットされているために、ランダムな動きをしているように見えます。また、後述の接触センサの信号はCRタイマーをリセットする働きがあり、障害物に接触するとバックして方向転換するという動きを実現しています。
すなわち、CRのタイマーがいっぱいカスケードされてつながっていて、最終的にモーターを動かしているという仕組みです。
モーターの制御は
リレーで行っています。トランジスタでスイッチングすると、回路があまりにも複雑ですので、ノイズというか干渉が大きすぎてうまく行きません。一度試したことはあります。
どうやって走行するのか
 前輪はホーロー抵抗、後輪は鈴めっき線で作った車輪を使っています。通称ネットスケープタイヤと名づけました。物凄い振動と騒音を引き起こし、床を傷つけます。決してフローリングの床の上で走らせてはいけません。
前輪はホーロー抵抗、後輪は鈴めっき線で作った車輪を使っています。通称ネットスケープタイヤと名づけました。物凄い振動と騒音を引き起こし、床を傷つけます。決してフローリングの床の上で走らせてはいけません。
回路図は?
ありません。でも、どの配線が何であるかはだいたい頭の中に入っています。
ロボットの電気的特性
抵抗やコンデンサを縦横無尽に組み合わせると、丈夫になるだけでなく、直流抵抗も減ってきます。それは、抵抗どうしが立体的に並列接続されるからです。そのため、このロボットのほとんどの任意の2個所間の直流抵抗を測ると、10Ω程度と大変低い値になっています。これゆえ、アース線を省略してロボットのボディーをアースとすることにしました。
一点アースの無視
これは普通の電子回路での「一点アース」という常識に根底から違反した設計です。
普通の電子回路では、一点でアースしないと回路のアースに電位差が生じ、信号が回り込んで誤動作や干渉や発振を起こすので、一点アースが常識なのです。しかし、このロボットでは、あえて一点アースを無視することによって、回路間での干渉を引き起こし、微妙なランダム性を醸し出しているのです。
回路の詳細
このロボットの回路はいくつかの部分に分けて考えられます。
- 接触センサ
このロボットは障害物に触れると、後ずさりして回転し、方向転換する機能を持っています。そのためのセンサはマイクロスイッチに対する言葉としてマクロスイッチと呼ばれています。マクロスイッチは15cm×7cm×1.5cmほどの空中配線回路でできた板です。この板の中にも小型の電池やLEDなどが入っているのですが、その板全体がロボット本体の前面に宙ぶらりになった構造になっています。
そのため、ロボットが障害物に接触するとこのマクロスイッチ自体がロボット本体に接触して、本体がショートします。すると、それを検知する回路が働いて、制御回路に後退と旋回の指令を出すのです。 - イルミネーション発光部
基本的に無安定マルチバイブレータで2個のLEDを光らせています。といっても2個のLEDは超(々)高輝度の青や緑や白のLEDが多く、しかも定格値よりも電流を多く流すこともあるので、目もくらむほどの明るさです。このような無安定マルチバイブレータを十数個載せていて、これらがアース線を通じて微妙に干渉しています。これを作った当時はまだ超高輝度の青や緑が高価だったので、惜しげもなく使った私の作品に皆驚いたそうです。 - 制御部
30個程度のトランジスタでできています。基本は、無安定マルチバイブレータとタイマです。形状はほぼ球形です。立方体のロボットの中心に球体のコアが入っているわけです。 - 光線銃で撃たれる部
光センサを光線銃で撃たれると、動作を停止し、真っ赤なLEDが光って燃えているイメージになります。このLEDも無安定マルチバイブレータで発振させているのですが、無安定マルチバイブレータのトランジスタとLEDを3つにしたところ、3つのLEDを順番に点灯させる回路がつくれました。
ボーグ艦ではないか?
お分かりの方もいらっしゃるとは思いますが、このロボットはスタートレックに出てくるボーグ艦をモデルにしています。私はボーグにとても感動したので、思わずこれを作ってしまったというのが、製作の動機の一つです。
(なお、Voyagerに出てくるボーグ艦は、床や壁が板材で構成されていますが、The Next Generationに出てくるボーグ艦、特に「無限の大宇宙 Q Who?」や「浮遊機械都市ボーグ The Best of Both World」に出てくるボーグは線材で構成されており、床も壁もスカスカです。こちらのピカード艦長の頃の古い方のボーグ艦がモデルです。)
なお、このロボットは他のロボットの部品(抵抗やコンデンサ)をも同化して取り込んでしまいます。
すなわち、抵抗は無意味だ
ということです。
故障と修理
このロボットは、これまでに幾度と無く故障しています。
火を吹いた!!
平成15年のクリスマスの頃、ナヒテックの納会のイルミネーション用に久しぶりに空中配線ロボットを動かしました。
その日はモータは動かさずに、LEDだけを長時間光らせようとして鉛蓄電池をつないだのですが、なぜかうんともすんとも動きません。あれ、変だなと思っていると、パーン!という大音響とまばゆい閃光が走り、モクモクと臭い煙が出てきました。その後、電源の+と−の間の抵抗値をテスターで測ると、どのように測っても0Ωと表示されます。鉛蓄電池を外して安定化電源をつないでみても、何アンペアでも吸い込んでしまいます。
この修理の記録を書きます。
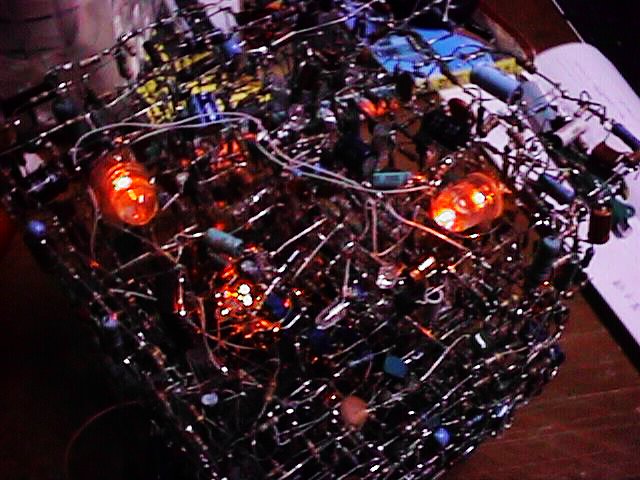
記憶によれば、破裂時の匂いが臭かったことと、破裂後に電源がショートしていることから、破裂したのは電源部分のタンタルコンデンサではないかという推測がたちました。また、故障の際には激しく破裂したので、きっと部品に外から見てわかる損傷があるはずです。音と光が出た位置は、ちょうどコアの部分だなと記憶していたので、コアの周辺で破裂しているタンタルコンデンサを重点的に探すことにしました。

ありました。上の写真の中央にある47と書かれた黒い四角い部品が、破裂したタンタルコンデンサです。外壁からおよそ5cmくらいの深さの位置に空中配線で固定されています。
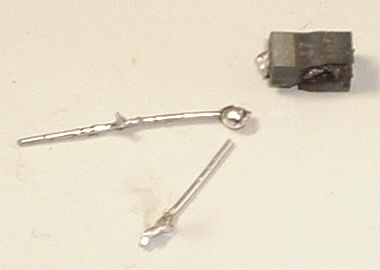
半田ごてを注意深く差し込んで、タンタルコンデンサを外します。外したのが下の写真です。
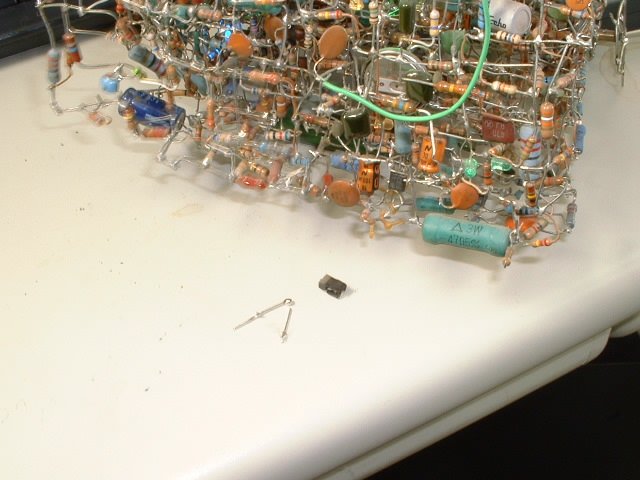
よくみてみると、見事に破裂しています。テスターで抵抗値を測ると0Ωでした。
タンタルコンデンサって、こんなに破裂しても導通しているんですね。なんか凄いですね。
タンタルコンデンサを電解コンデンサに取り替え、元どおり元気に動くようになりました。

そもそも鉛蓄電池がいけなかったのかもしれません。
作った感想
回路は3次元になるとなかなか作るのは大変でした。やはり立体の効果というのはすごい量があるな、と感じました。このロボットを作り終わった時には半田ごてから部品を伝わってくる熱で、爪がなくなっていました。指も火傷だらけで、もはや感覚がなくなっていました。私は半田ごての先に触ったくらいでは火傷しないのですが、このロボットを作るときには、数十時間の不眠不休ではんだ付けしっぱなしだったので、低温火傷でもしたのでしょう。
最初は、ただ空中配線で何か面白いものを作りたかっただけだったのですが、結構本格的なものができてしまい、自分でも驚いています。クリスマスのイルミネーションにも最適です。今後、このような空中配線の趣向では、もっと一様な構造のロボットを作りたいと考えています。つまり、電力伝送や制御や構造材などの役割を分担して持つ小さな回路が多数集まって作られる巨大な回路です。それぞれの小さな回路は同じ構造をしているので、全体として見れば一様な構造になるわけです。そして、回路の大部分が破壊されても残った部分でも機能を維持していけるような構造が理想です。
近い将来暇ができたら、空中配線でより優れた芸術作品を目指して、また何か作りたいです。
よい題材を探しています。仏像や鳳凰がいいかな。
写真
{kind=link}
{kind=link}
{kind=link}
{kind=link}